

Old Robots
This page is a work in progress due to lack of documentation from previous years. We are doing our best to update!
Abe | 2018
Our robot for the 2018 FRC Season, it was named for our second competition (Lincoln).
First Power Up

FIRST POWER UP involves two alliances of three teams each, with each team controlling a robot and performing specific tasks on a field to score points. The game has a retro 8-bit theme and teams are required to place milk crates, or "power cubes", on large balancing scales to tip the scale and gain ownership. Alliances can also trade power cubes for power ups, giving them a temporary advantage in a match. At the end of the match, robots can climb the tower attached to the center balancing scale using a rung attached to the tower, giving them additional points.
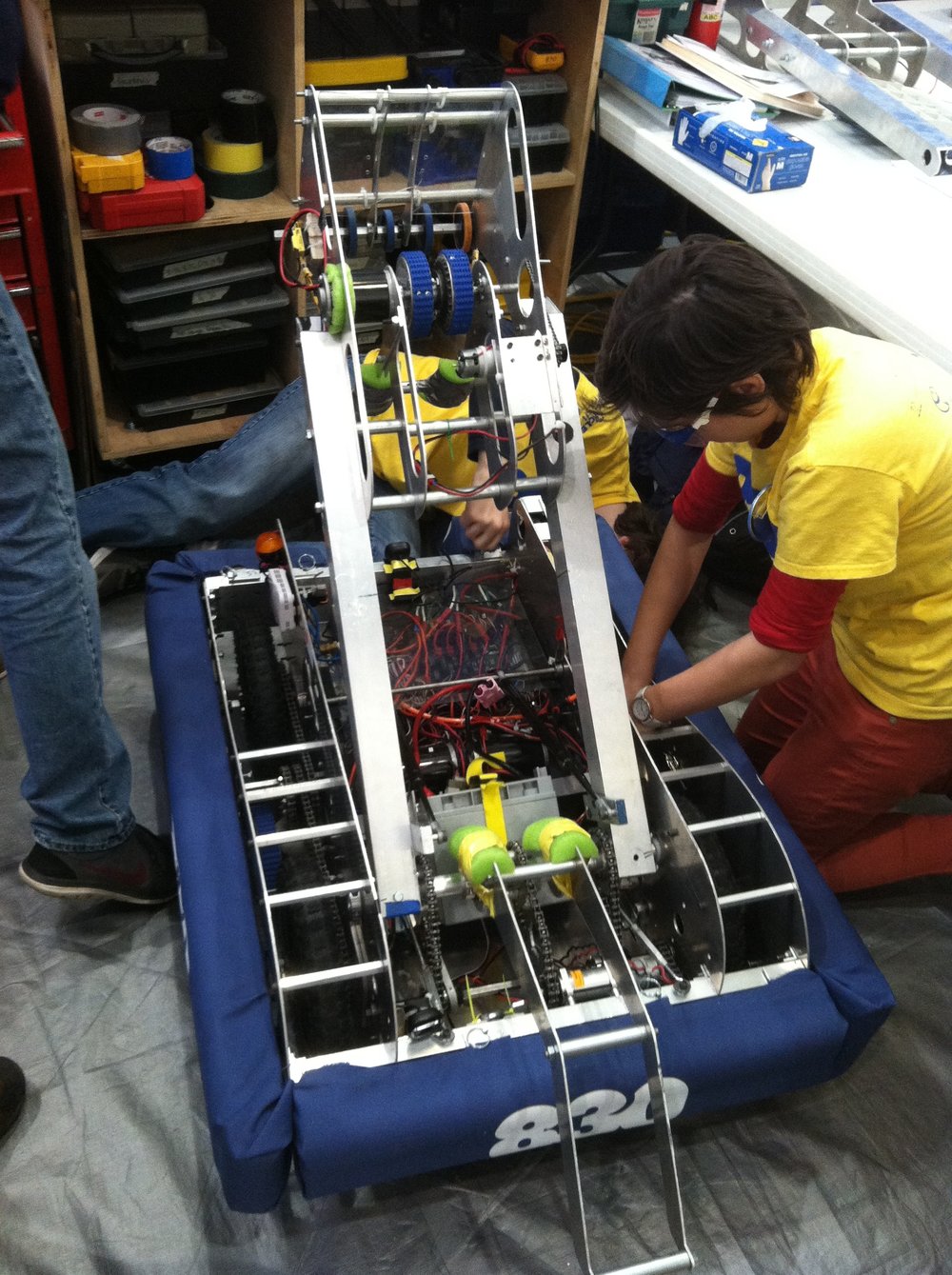
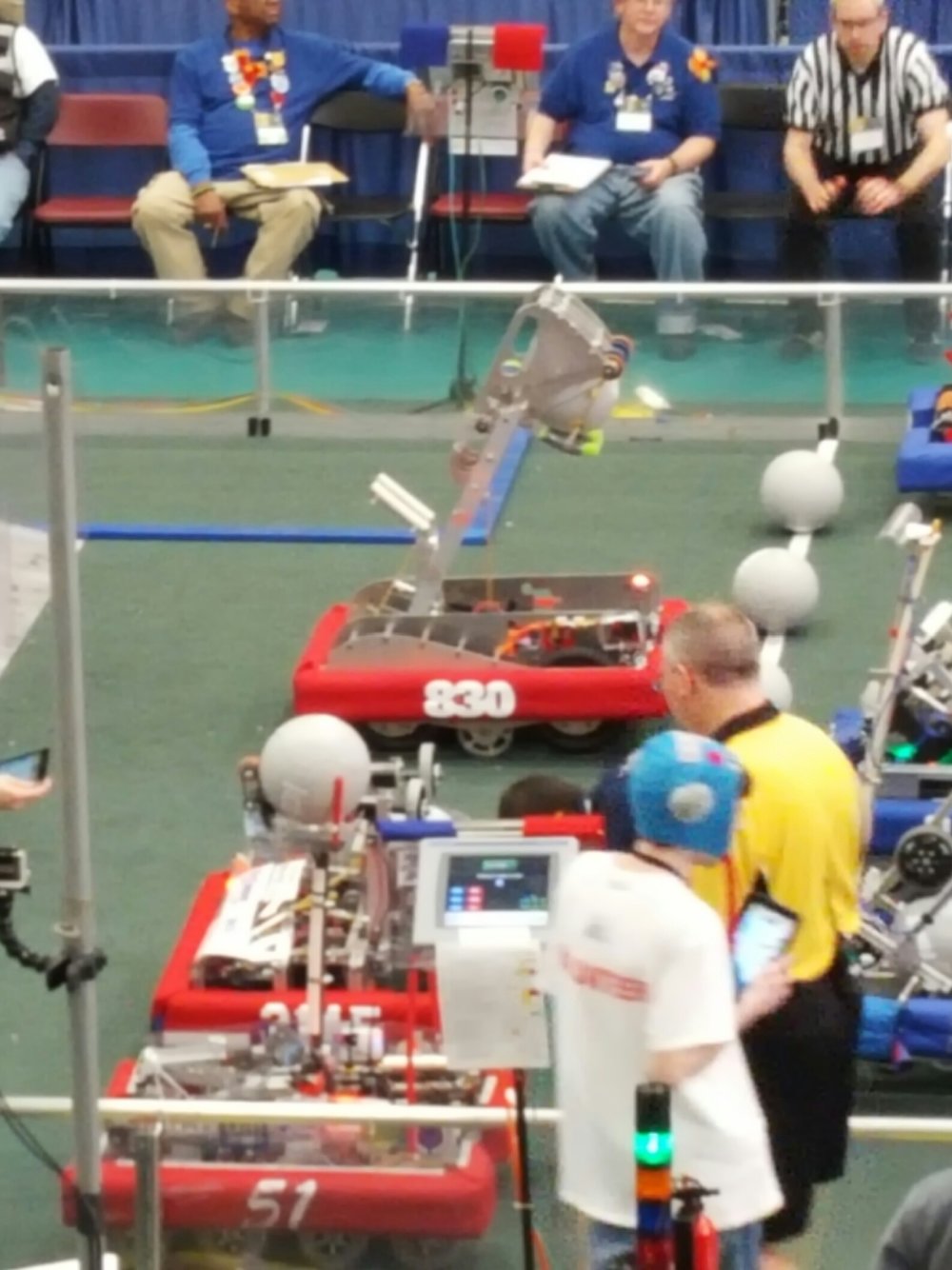
Sauron | 2017
Our robot for the 2017 FRC Season, named for its vibrant LED ring, which sits atop a tower-like structure. It is capable of catching a rope with a knot on the end in its climbing mechanism and, obviously, climbing up it. It is also capable of obtaining and delivering gears, as well as shooting and intaking fuel cells with 70% accuracy.
FIRST Steamworks

A steampunk themed game that requires alliances of three robots each to compete against each other to try and score fuel cells (large-ish, neon yellow whiffle balls) into the boiler in order to fuel an 'airship.' Human players (pilots) in the airship collect gears from the robots below in order to prepare the ship for flight and when the match is 30 seconds to complete, human players drop a rope for the robots to climb aboard the airship.

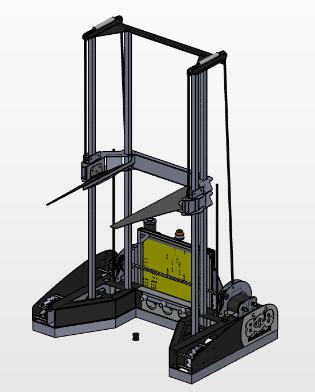
Jenga
Jenga is our 2016 competition robot. It is a robot designed to be able to cross most of the obstacles presented by First Stronghold and is able to shoot for both high and low goals in the game. Its arm raises out of the chassis and shoots to the perfect height when lined up against the tower.
2016 | FIRST Stronghold
FIRST Stronghold was the 2016 FRC game. It required robots to cross through different defenses, such as doors or different types of terrain, and to shoot boulders into the opposing alliance's tower to 'destroy' it. Jenga aimed for the high goal, as we were able to design the robot to drive up to the tower and shoot from there. However, Jenga is also capable of crossing over almost all of the defenses without fail.
Black Knight | 2015
Black Knight was the 2015 competition robot. It is a robot designed to be able to pick and stack totes up to six high along with adding a recycling bin onto the top of the stack and be able to deal with fallen totes and pool noodles in the way.
Recycle Rush
A recycling themed game that called for alliances of three robots each to stack totes and cap them with recycling containers, and to place pool noodles in these containers. In line with the nature of the game and its theme, all of the parts and game pieces used in the game were chosen specifically because they were reusable for teams, volunteers, and FIRST coordination teams alike.
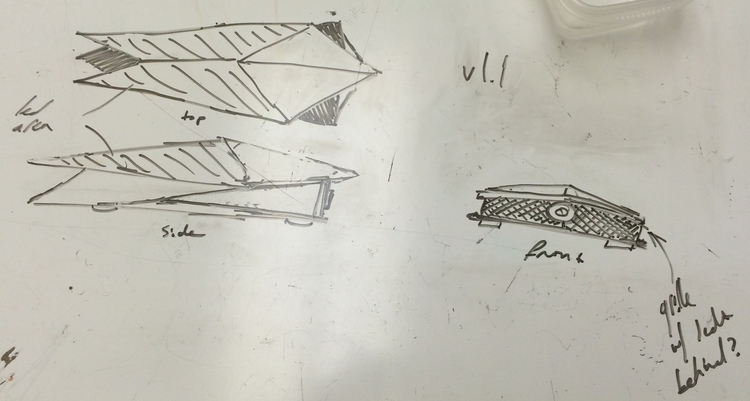
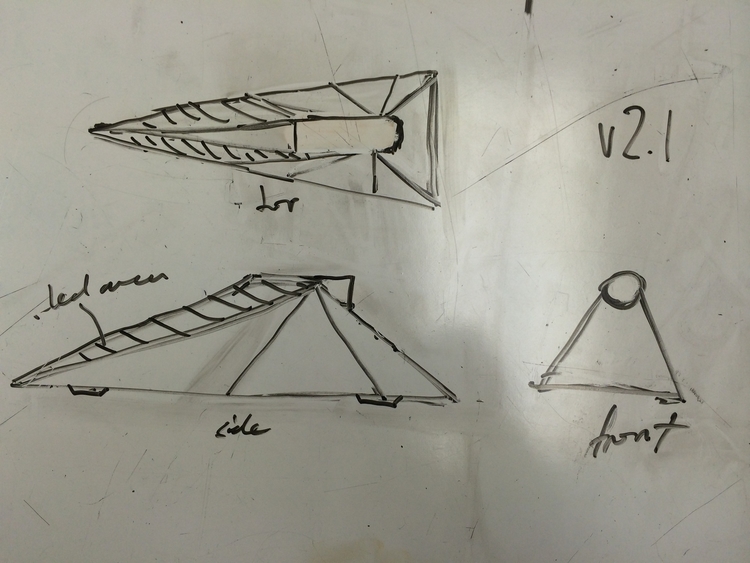
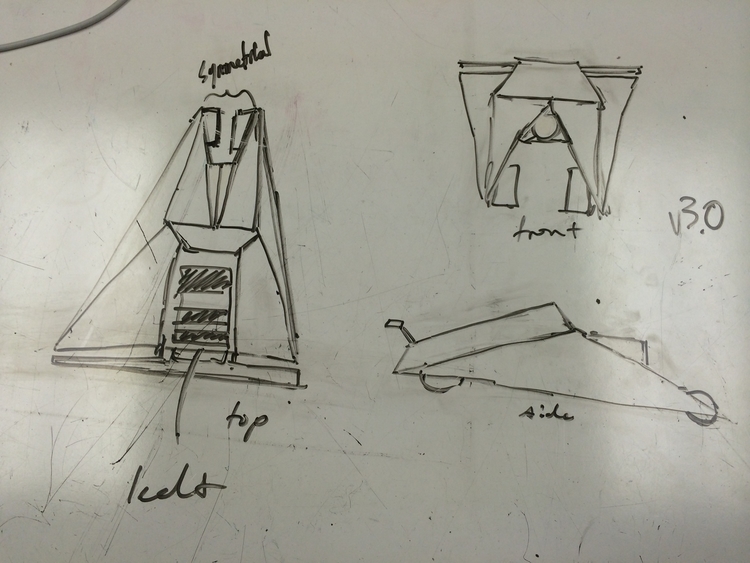
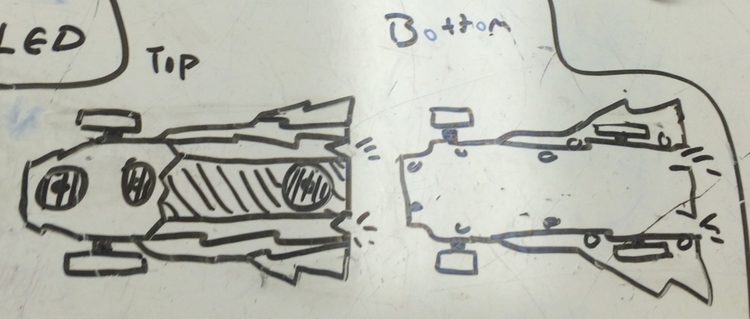
Laserbots | 2014
The laserbots were a summer project that consisted of two robots, Rivet and Bolt - Rivet had a sharper design, and Bolt was much smoother in design. Each bot were planned to incorporate parts of laser tag guns to detect one another, and controllers were designed so that the two bots would 'fight' using these components. Lights on the bots would indicate robot 'health', and the lasers would be used as, well, lasers to lower said health. Sadly, these bots never made it far past the design stages due to a variety of issues.
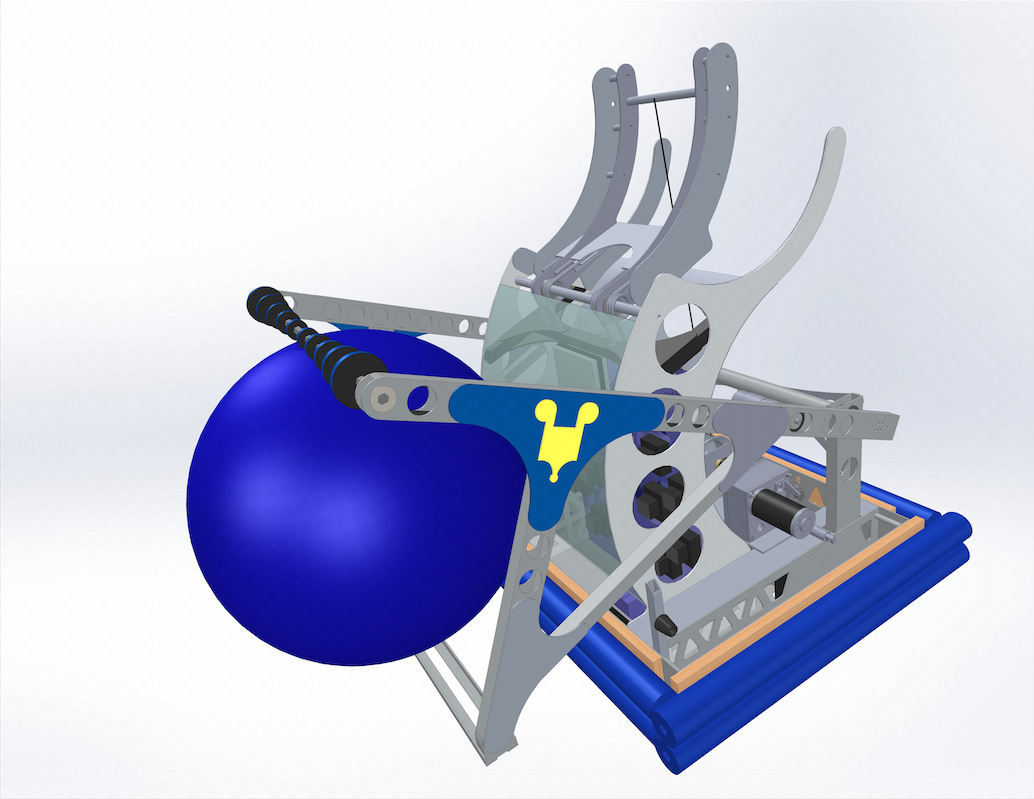


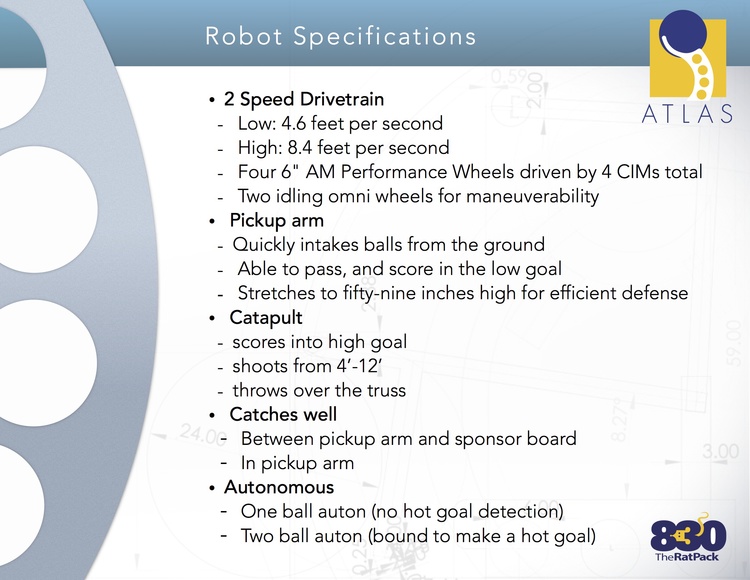
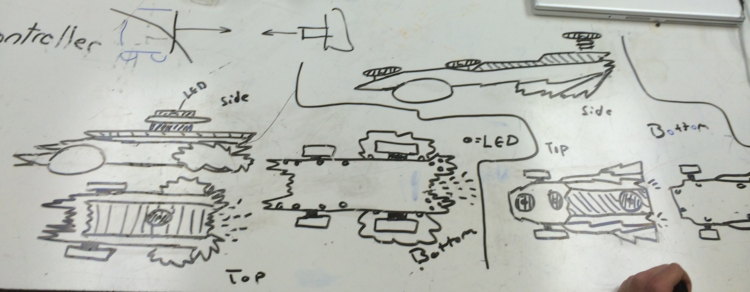
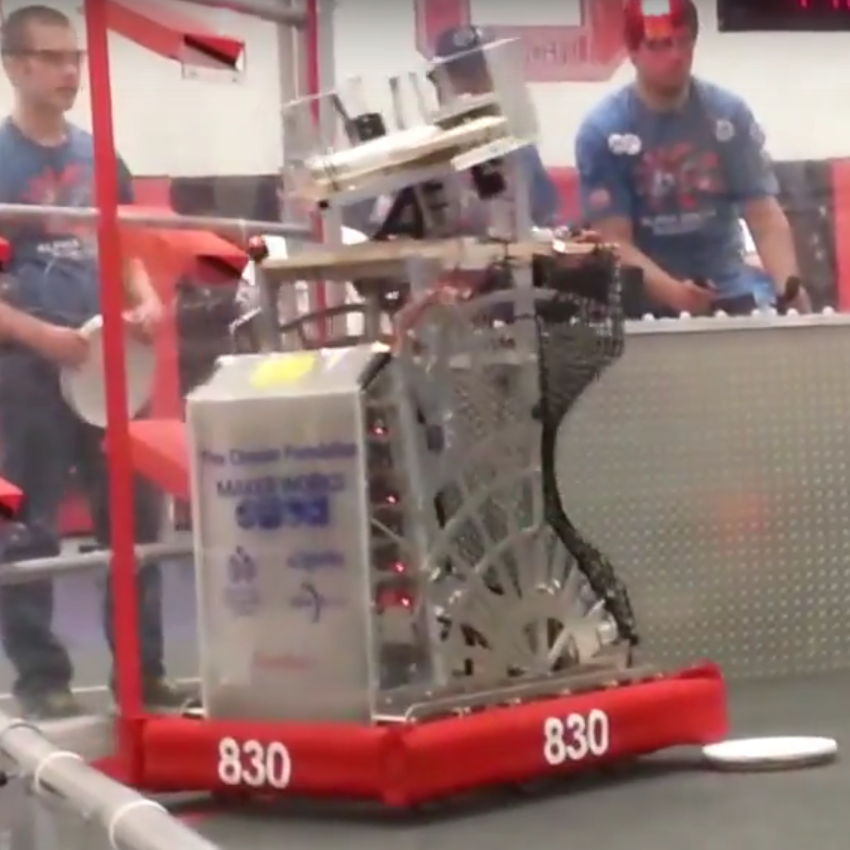
Atlas | 2014
Atlas was the 2014 competition robot.
Aerial Assist
The 2014 game, Aerial Assist, alliances compete by trying to score as many balls in goals as possible during a two-minute and 30-second match. Additional points are earned by robots working together to score goals, and by throwing and catching balls over a truss suspended just over five feet above the floor as they move the ball down the field



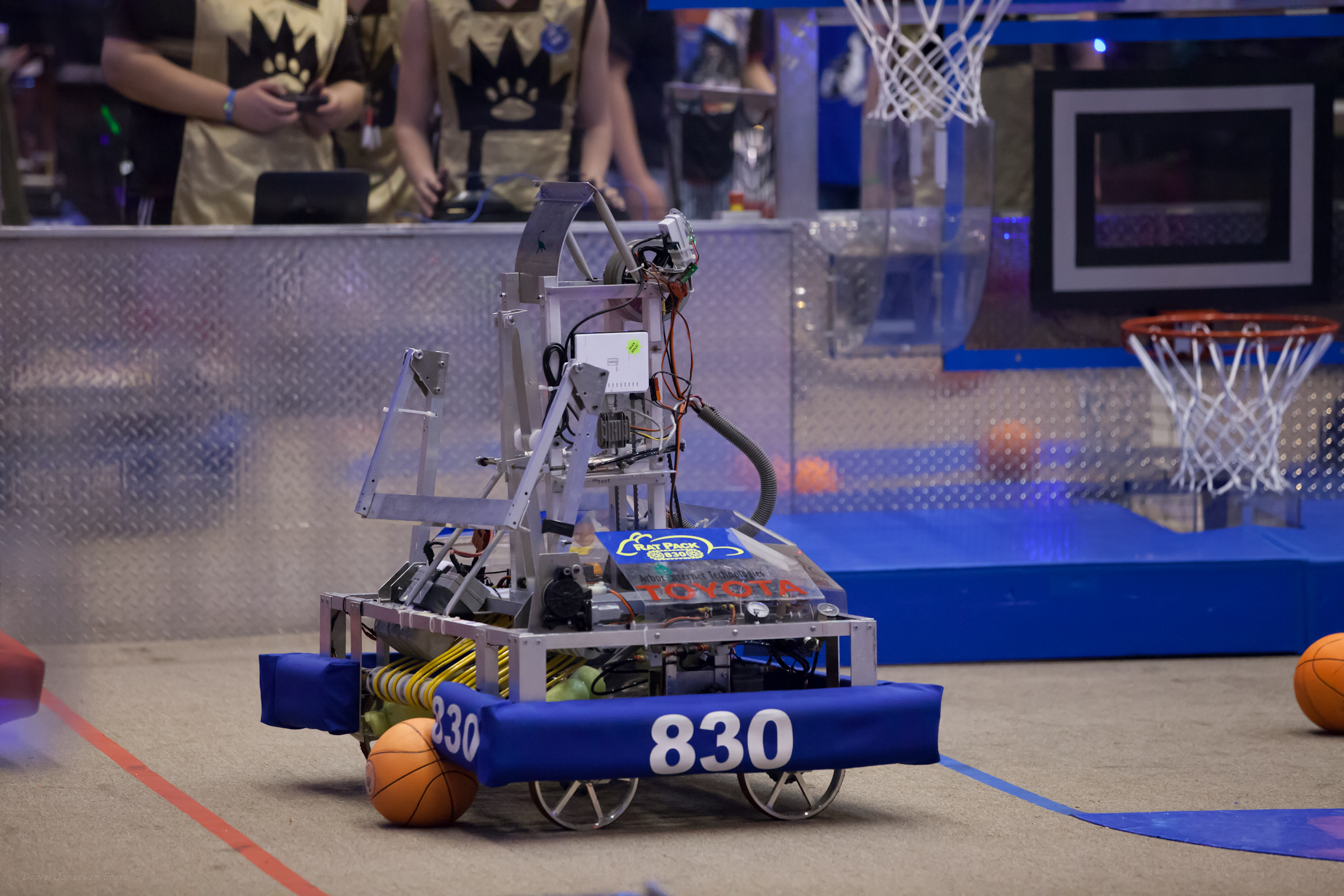
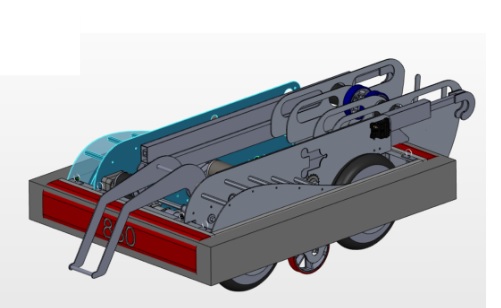
Zoidberg | 2012
Zoidberg was the first robot built in our new location at Maker Works. This robot won the 2012 state competition along with teams 469 and 67, and took the teams to the world competition in St. Louis.
Rebound Rumble


Unknown Bot | 2006
Not much is known about this robot, aside from its historic value! This would have been our team's fifth season.
Aim High